RH技術のバイラテ環境での動作記録は、単独での再生動作においてサイズや硬さのバラつきに対しても対応が可能です。位置制御ロボットのティーチングとプレイバックとは異なり、力制御が加味したプレイバック動作では、対象物のサイズが小さい場合には反発力を測定することで掴みにおける位置を変更したり、サイズが大の場合には掴みにおいて間隔を広げて対応するなど柔軟な動きとなります。RHのティーチング&プレイバックの解りやすい実験結果を添付致しました。
ゴロニャン通信を的時発信
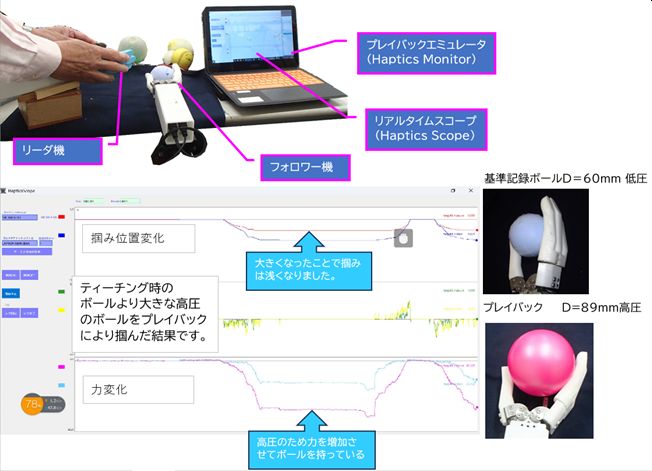
RH技術のバイラテ環境での動作記録は、単独での再生動作においてサイズや硬さのバラつきに対しても対応が可能です。位置制御ロボットのティーチングとプレイバックとは異なり、力制御が加味したプレイバック動作では、対象物のサイズが小さい場合には反発力を測定することで掴みにおける位置を変更したり、サイズが大の場合には掴みにおいて間隔を広げて対応するなど柔軟な動きとなります。RHのティーチング&プレイバックの解りやすい実験結果を添付致しました。